 Real time CORBA developers require to give strict attention to the allocation and to the predictability of execution entities. Real Time CORBA has scrapped of a few things from normal CORBA in order to support real time systems.RT CORBA does not currently address dynamic scheduling. Real time CORBA does not define IDL for an activity. Instead of worrying about delimiting an activity, it deals with invocations of IDL defined operations.
Real time CORBA developers require to give strict attention to the allocation and to the predictability of execution entities. Real Time CORBA has scrapped of a few things from normal CORBA in order to support real time systems.RT CORBA does not currently address dynamic scheduling. Real time CORBA does not define IDL for an activity. Instead of worrying about delimiting an activity, it deals with invocations of IDL defined operations.A traditional CORBA program flow is like: An operation invocation consists of a Request and a Reply. It is initiated by some client computational context (e.g. a thread) and passes through a client-role ORB, a transport protocol (TCP in the case of GIOP), a server-role ORB (possibly involving queuing) to a server application. Thereafter the operation passes through the same entities in reverse order, back to the client.
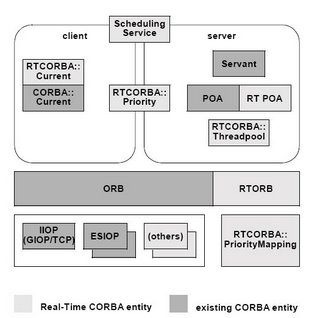
RT CORBA uses four components namely,
- Scheduling support from OS
- Real Time ORB
- Transport medium
- Application
- Respective thread priorities between client and server for resolving resource contention
- Bounding the duration of thread priority inversions during end-to-end processings
- bouding the latencies of operation invocations
Thread Priorities: Real-Time CORBA defines a universal, platform independent priority scheme called Real-Time CORBA Priority. It is introduced to overcome the heterogeneity of different Operating System provided priority schemes, and allows Real-Time CORBA applications to make prioritized CORBA invocations in a consistent fashion between nodes with different priority schemes. Real-Time CORBA defines a NativePriority type to represent the priority scheme that is ‘native’ to a particular Operating System. Priority values specified in terms of the Real-Time CORBA Priority scheme must be mapped into the native priority scheme of a given scheduler before they can be applied to the underlying schedulable entities. Real-Time CORBA defines a Real-Time CORBA Current interface to provide access to the CORBA priority of a thread.
A Real-Time operating system (RTOS) sufficient to use for implementing a Real-Time ORB compliant with this specification, will have some discrete representation of a thread priority.
Priority Models: Real-time CORBA defines two models at which a server handles a clients request:
- A model in which server respects priorities of inivocations set by clients. Server ORB maps this Real-time CORBA priority to Native OS priority. Requests coming from a non Real-time ORB are handled according to server priorities
- Server handles the inovocations according to the Real-time priorities set by the server side
Other cool features:
- Real-time CORBA provides clients to obtain a non multiplexed connection, which will not be shared with other client-server communications.
- Allows applications to set a timeout on the invocation in order the bound the time the client is blocked and waiting for the response.
- Server side thread configuration.
- Configuration of priority models set by clients or server. A new Real-time CORBA POA policy would be created on aboves.
No comments:
Post a Comment